客畅网4月30日讯,华为智能汽车解决方案BU CEO余承东今日通过社交媒体发布了首期汽车技术解析视频——揭秘智能驾驶系统如何实现全方位环境感知能力。

针对公众关注的"无目视传感器车辆如何识别障碍物并规避"这一核心问题,视频进行了深度技术拆解。
技术解析指出,视觉传感器自上世纪起便承担了环境模拟人眼的功能,虽能精准识别交通信号与道路标识,但在低光照或强光干扰环境下仍存在识别误差。
为突破光学限制,工程团队引入毫米波感应装置,该设备不受光照条件制约,在夜间及恶劣天气下保持稳定探测性能,尤其在暴雨浓雾等极端场景中展现显著优势。
然而技术发展永不停歇,传统毫米波系统仍存感知盲区——仅能测定目标距离与运动速度,却无法获取高度维度数据,导致路面减速带、空中桥梁等立体结构难以区分。
这种维度缺失直接制约了车辆对不同场景的应变能力。
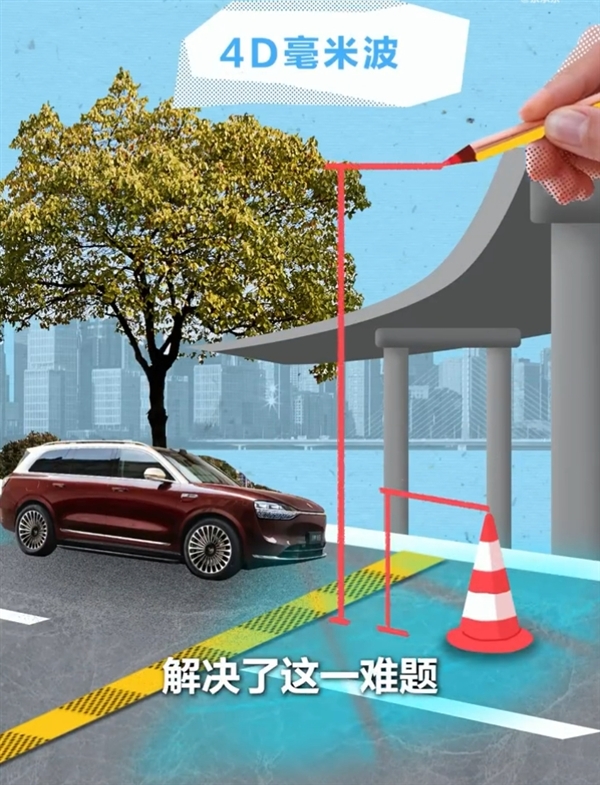
创新解决方案应运而生,新一代4D毫米波技术通过增加垂直方向探测,成功构建三维空间感知模型,有效解决高度信息缺失难题。
尽管如此,毫米波系统仍存分辨率瓶颈,仅能勾勒物体轮廓,无法精确识别目标形态特征。
此时激光三维扫描技术开始发挥关键作用。
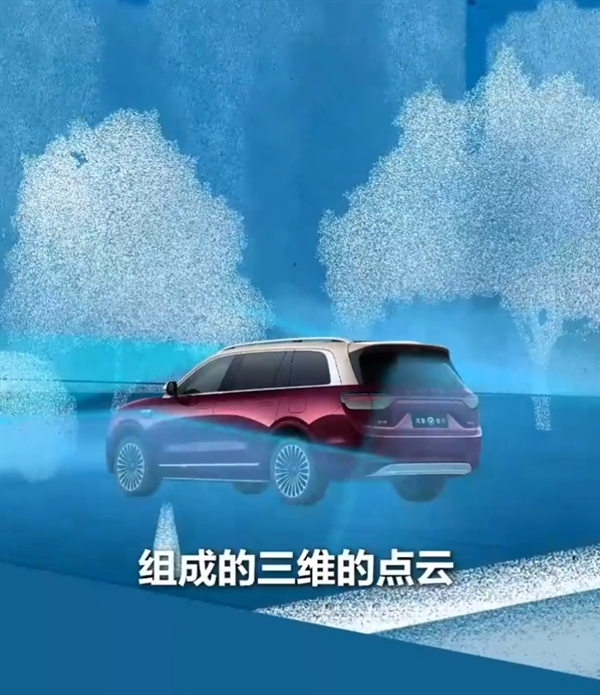
技术原理显示,激光雷达通过发射不可见光脉冲,依据反射信号构建百万量级的空间点云模型(如手部三维扫描示意图),实现微米级精度环境重建。

虽然激光扫描具备超高解析度,但在穿透性能与色彩识别方面存在局限,难以单独承担全场景感知任务。
专家强调,真正的智能感知系统需融合视觉传感器、4D毫米波阵列与激光扫描装置,通过多源数据协同实现全天候、全地形精准感知,有效应对眩光、雨雾等复杂环境挑战。